What is Phone Tracking
Imagine a reality in which you always know where your child is without even making a phone call. Imagine a relief to know that a person you care about is out of trouble and does not conceive anything. Imagine it being as easy as checking your inbox – in one click. Cell phone tracker is just the tool we are talking about. Having been out and about for years now, not many people know about it. So, what is this phone tracker and how does it work?
Firstly, it is a free GPS phone tracker type of apps that tell a precise location of a device. Secondly, it gives you access to all audio, video, photo, and text info stored on the phone. And, thirdly, it enables you to control the target device without anyone but you knowing about it. In this article, we are going to make a quick overview of the 3 phone location tracker apps, which you can download and start using for free.
| Product | Image | Rating | Price |
|---|---|---|---|
| Hoverwatch |  | 4.9 | 24.95$ |
| mSpy | 4.7 | 26.99$ | |
| Mobile Tracker Free | 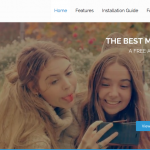 | 4.5 | 30$ |
Hoverwatch
Hoverwatch is a completely invisible app that tracks a target device operating in stealth mode. There are no notifications, no pop-ups, and no signs of an app on the target device.
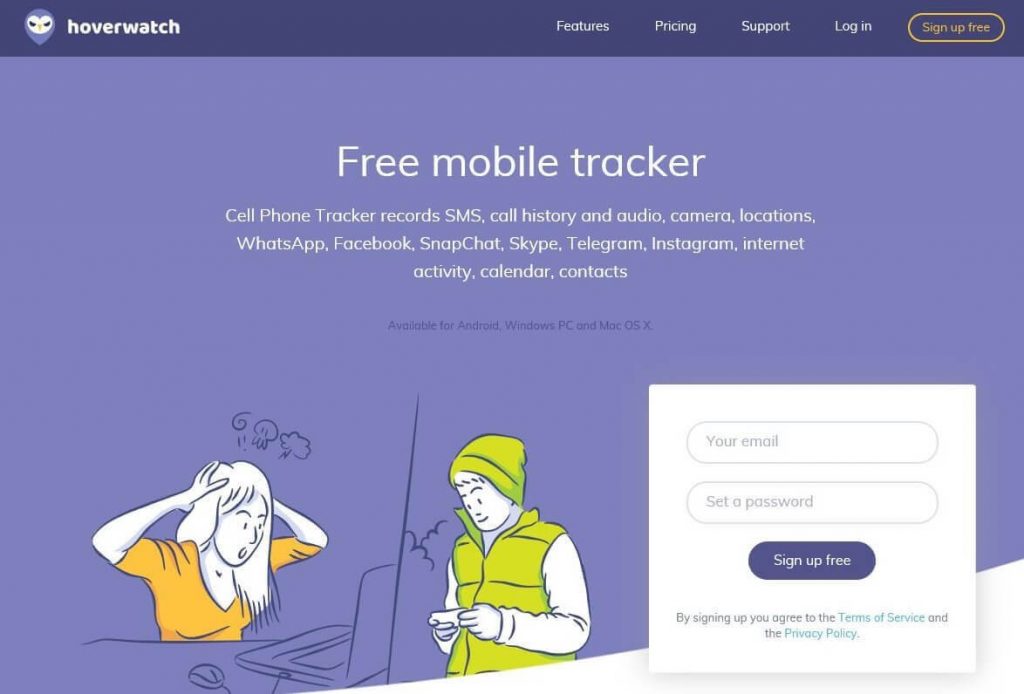
It means that a tracked phone owner has no chance to find out about your activity. In a nutshell, check the list of options that the free cell phone tracker by number gives you:
- Track Internet browser history;
- Check phone call history;
- Read SMS;
- Track messages on Viber/Whatsapp/Facebook;
- Track phone location.
The app works for Android, Windows, iOS, Mac-based devices.
Hoverwatch is a free phone tracker that is very easy to install and set up. However, if you plan on using it on a regular basis, you might consider a subscription. There are three basic plans designed with consideration of specific goals and needs.
| Plan | Personal Plan | Professional/Family Plan | Business Plan |
| Devices | 1 Device | 5 Devices | 25 Devices |
| 1 month | $24.95 | $49.95 | $149.95 |
| 3 month | $59.95 | $99.95 | $299.95 |
| 1 year | $99.95 | $199.95 | $499.95 |
- Personal plan. With this subscription plan, you can monitor 1 device, using all features by default.
- Professional plan. The professional package enables tracking 5 devices at a time with all functions included.
- Business plan. A business plan allows you to track 25 devices, of course, with all features included.
As you may have guessed, the price goes down as you purchase a package for more devices but, of course, it’s entirely up to you.
So, now that you’ve decided to install, there’s nothing easier. First of all, register with Hoverwatch. Then, take a device you wish to install the software on and download it. The installation process is mostly automatic, you only need to click OK or ALLOW each time your permission is needed.
NB: When installing the phone tracker free app on the target phone, be very cautious not to leave any marks. Delete browser page and download histories. Delete pop up notifications and close all the open windows. Make sure you have turned the stealth mode on.
We rate this app 4.9/5
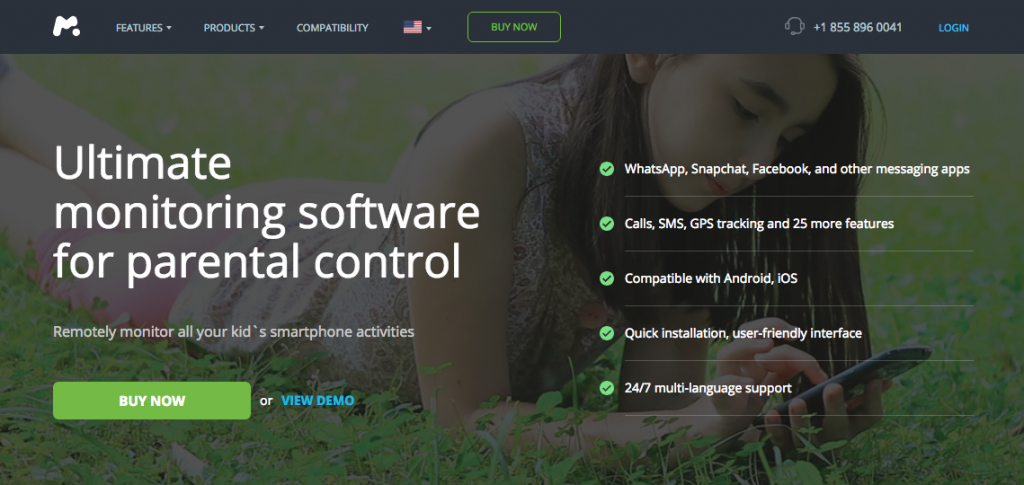
mSpy
mSpy is yet another free cell phone tracker positioned mainly as a parental control tool. mSpy has become a solution for many parents who have detached relationships with their children and couldn’t have known what’s going on with them if not for mSpy. Literally, this phone number tracker turned out the last resort they would turn to – and weren’t mistaken about.
The app can be downloaded on any Android device or iPhone. App developers took care of parental reluctance to be caught spying and created an improved option for iPhone without jailbreaking. This type of subscription is the most expensive one, yet it gives you the assurance that you are under cover. Here are the main features of mSpy:
- ✔ a perfect GPS phone tracker;
- ✔ access to phone calls and SMS;
- ✔ inner apps access (WhatsApp, SnapChat, Facebook, etc.);
- ✔ compatible with iOS 7/ OS 4+ to current;
- ✔ 24/7 customer support in 10 languages;
- ✔ quick install and easy navigation.
Some parents buy mSpy only as a phone number tracker with location info. However, sooner or later they are forced to utilize it in full strength to prevent their children from dangerous or unforeseen consequences. So, let’s review the full list of possibilities of this app and how exactly it can help you protect your child.
- Monitor phone calls and SMS. Noticed your child gets upset once someone texts or calls? Chances are, your child is a victim of bullying and only by knowing what it really is, you are in power of stopping it. Just install a cell phone number tracker.
- Check their browser history. Children don’t ask parents questions anymore – they ask Google. Find out what is bothering your kid and the ways to help out with a phone tracker app.
- Review app chats. Chatting with some social media “friends” can do your child no good, especially if the person is not from your child’s usual surrounding.
- Track location. With free GPS phone tracker, you don’t need to keep wondering where he or she is.
- Monitor pictures taken and images sent/received. Probably, someone is sending your child pictures of provocative or abusive nature? Check all photos on your child’s phone no matter what app they were received from.
You can create an account and download the app anytime but only its demo version. To get access to all spying features, you need to buy one of the subscription packages available. The prices vary depending on the number of apps and tracking options you want to be included. For example, while the basic subscription is the cheapest option, it won’t allow you tracking messages from the most trending apps, including Tinder and Instagram. Premium and no-jailbreaker packages are ‘all-inclusive.’ You can get familiar with pricing for each package and choose one with the help of live chat assistant in a matter of minutes.
We rate this app 4.7/5
Mobile Tracker Free
Finally, the free app for device tracking with no prerequisites is available for download. The software goes with the standard set of features and several original specifications, namely:
- Remote control;
- Restriction function;
- Analysis tool.
In a nutshell, these 3 extra features grant you the level of control similar to that of your own device. Let’s go over each one of them.
- Remote Control. This function enables you to pass the commands to the phone even though you might not have direct access to it. For instance, you can take a picture, send SMS, make calls and leave notes. You can remotely ring the phone, take a screenshot, recover any data, enable and disable Wi-Fi, restart or even block the phone!
- Restriction Function. This one is a useful toolkit of all parents who struggle to prevent their child from abusing their phones. By restricting phone usage for several hours a day, you help your child concentrate on studying, hobby, or family. You also break the vicious circle of device addiction, which is so common among modern youth.
Note that you can also restrict the usage of only one app or browser site.
- Analysis Tool. This feature is, by all means, the best if you want to see the overall picture. It will enable you to check what sites or apps your child spends the most time on or who he or she communicates on the Internet most frequently. In one glance, simple infographics will let you know it all.
This tool is not a bit inferior to competitors in terms of the number of apps it can help you access. Be sure, your child uses at least one, if not all, of apps below.
- FACEBOOK MESSENGER
- SKYPE
- HANGOUTS
- LINE
- KIK
- VIBER
- GMAIL
- TANGO
- SNAPCHAT
- TELEGRAM
Other Useful Features
File Explorer with full access will be also present on your account. You can make yourself a cup of tea and start going over the files that are stored on the device/devices. Why is this important? Firstly, you can locate content that you wouldn’t want your child to read/watch or share. Secondly, you can locate the source of these files and nip it in the bud. Or, as a business owner, you can find what or who puts your performance at risk.
We rate this app 4.5/5.0
Summing Up
A recent development of technology and virtual communication have made thousands of parents question the innocence of these games. Children catch up the latest trend much faster than us, adults. So, how then can we claim we give them enough parental protection?
The three GPS cell phone tracker apps we reviewed in this article offer a radical approach to this problem as opposed to just sitting there doing nothing. At times, we just need to act in the interests of our loved ones who may not be aware of the dangers that we can envision.
Many grateful parents managed to stop their children from frivolous decisions and the consequences those might have entailed. It only takes to know what your child is up to, to take the right stand and do what is worth. So, if you google phone tracker apps and/or their reviews, we hope our article gave you useful info about the top 3 apps on the market.